In Part 1 we took care of the preliminaries, setting up our assets, and getting a base layer root and hip motion going on which to start grooving. In this part we’ll take the next step and start stepping.
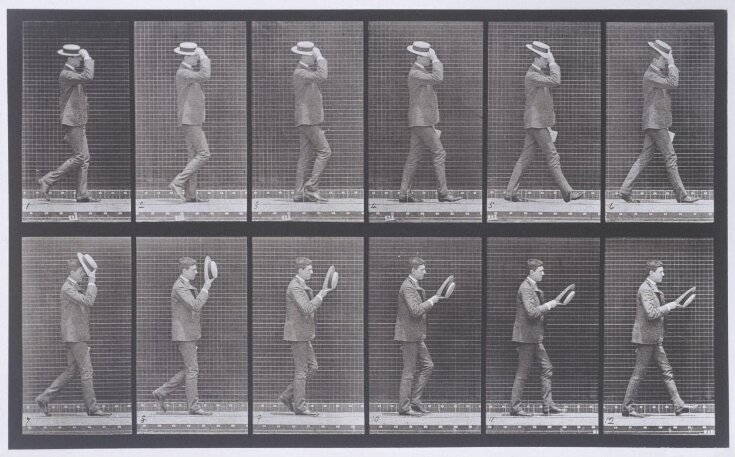
One of the famous Eadweard Muybridge photos.
In Part 1 we took care of the preliminaries, setting up our assets, and getting a base layer root and hip motion going on which to start grooving. In this part we’ll take the next step and start stepping.
One of the famous Eadweard Muybridge photos.
This is the first article in a series on implementing procedural locomotion. I’m going to walk through step-by-step generating walkcycles for a pair of robo-pants. Part 1 will mostly be setup and preliminaries, but we’ll at least go far enough for the gestures to start exihibiting personality.
Download the model, if you’d like to follow along.

I’ve planned for three playable pilots since my earliest prototype.
The design goal is straightforward: approaching the same mission with different pilots who handle differently increases replay variety. It also acts as a difficulty handicap for casual or hardcore players to opt-into by choosing particular easy or challenging pilots for particular maps.
This week I was feeling ambitious and decided to flex my illustration muscles, and made a nice set of pilot-portrait key-art, as well as sketch concepts for their fighter craft. I really want to push the 80s mecha-anime space-opera creative direction.
Let’s take an art-dive into the inspiration and iterations on Tiny Starpilot’s transforming player jet/robot.